
El desarrollo de un robot es un proceso iterativo, es decir, un robot es resultado de fases sucesivas de desarrollo. Con esto, se busca que le robot cumpla una serie de objetivos:
- Tamaño y peso reducido.
- Mínimos juegos u holguras.
- Gran rendimiento.
- Su estructura no debe afectar al movimiento.
- Y que sea capaz de soportar un funcionamiento continuo a la par que elevado.
Además, los materiales con los que está construido un robot afectan a su inercia, su respuesta dinámica, su precisión y su uso industrial.Por ejemplo, si la estructura de un robot no es los suficientemente rígida, la precisión del posicionamiento se ve afectada por la deformación estática resultante en el efector final. Por este motivo, la elección de los materiales a la hora de fabricar un robot es uno de los pasos más importantes.
MATERIALES:
Se puede utilizar prácticamente cualquier material a la hora de construir un robot, pero, los mas comunes, debido generalmente a los buenos resultados que suelen proporcionar, son los plásticos de ingeniería, tales como ABS, DELRIN, ARNITE, Polietileno de alta densidad o PVC. Estos plásticos son fáciles de mecanizar, permiten muy buenos acabados y son autolubricantes. Sus carácteristicas principales son:
.PNG)
.PNG)
Una vez elegidos los materiales con los que se va a realizar el robot, es necesario crear las piezas que lo van a formar. Existen diversos tipos de componentes.
COMPONENTES:
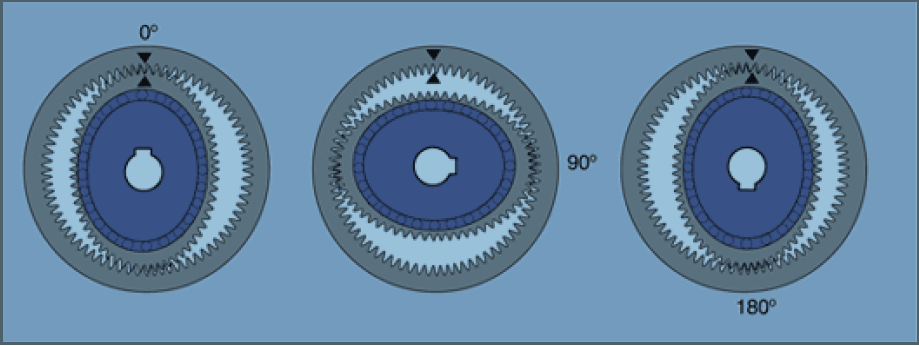
-Las transmisiones y los reductores: Los dispositivos de transmisión de potencia mecánica influyen en la precisión del robot. Por ejemplo, las transmisiones de potencia basadas en reductores con engranajes tienen juegos muertos que afectan a la resolución y repetibilidad del robot.
Pero, ¿qué son los transmisores y los reductores? Los transmisores son piezas que reducen el momento de inercia (el acercamiento de los actuadores o partes del robot que que realizan la acción para la cual fue creado a la base), y que actúan mediante una conversión lineal-circular y viceversa; mientras que los reductores son piezas cuyo fin es adaptar la velocidad de salida de los actuadores a los valores adecuados para los eslabones del robot. Las características principales de estos componentes son:



.PNG)











MATERIALES:
Se puede utilizar prácticamente cualquier material a la hora de construir un robot, pero, los mas comunes, debido generalmente a los buenos resultados que suelen proporcionar, son los plásticos de ingeniería, tales como ABS, DELRIN, ARNITE, Polietileno de alta densidad o PVC. Estos plásticos son fáciles de mecanizar, permiten muy buenos acabados y son autolubricantes. Sus carácteristicas principales son:
.PNG)
.PNG)
Una vez elegidos los materiales con los que se va a realizar el robot, es necesario crear las piezas que lo van a formar. Existen diversos tipos de componentes.
COMPONENTES:
-Las transmisiones y los reductores: Los dispositivos de transmisión de potencia mecánica influyen en la precisión del robot. Por ejemplo, las transmisiones de potencia basadas en reductores con engranajes tienen juegos muertos que afectan a la resolución y repetibilidad del robot.
Pero, ¿qué son los transmisores y los reductores? Los transmisores son piezas que reducen el momento de inercia (el acercamiento de los actuadores o partes del robot que que realizan la acción para la cual fue creado a la base), y que actúan mediante una conversión lineal-circular y viceversa; mientras que los reductores son piezas cuyo fin es adaptar la velocidad de salida de los actuadores a los valores adecuados para los eslabones del robot. Las características principales de estos componentes son:
- Bajo peso, tamaño y rozamiento.
- Capacidad de reducción elevada en un único paso.
- Mínimo momento de inercia.
- Mínimo juego o Backslash.
- Alta rigidez torsional.
Tipos de transmisores según su conversión:
Reductor "Harmonic Drive"
Reductores "IIIb"

-Los actuadores: Estos son los dispositivos que realizan los movimientos o acciones para los que está programado el robot. El tipo de accionamiento de potencia afecta a la respuesta dinámica, y al sistema de control del robot: por ejemplo, un robot con accionamientos neumáticos no puede dar resultados satisfactorios para aplicaciones de posicionamiento, como puede ser el ensamblado de piezas. Características de los actuadores:
- Potencia.
- Velocidad.
- Controlabilidad.
- Peso y volumen.
- Precisión.
- Mantenimiento.
- Coste.
En robótica, se pueden distinguir diversos tipos de actuadores:
- Neumáticos (cilindros y motores).
- Hidráulicos (cilindros y motores).
- Eléctricos (DC, AC y motores "paso a paso".
Aquí os dejamos una tablilla con las diferencias entre los diversos tipos de actuadores empleados en robótica:


Válvula mecánica

Motor de paletas Motor de pistones axiales

Cilindro neumático de doble efecto

Actuador rotativo piñón-cremallera
-Los sensores internos: Estos dispositivos son aquellos que se encargan de recaudar información del medio en el que se encuentra el robot, por decirlo de una manera, son como los órganos de los sentidos del robot. Los sensores de un robot caracterizan la calidad de la respuesta del sistema de control, la estabilidad del mismo y las prestaciones del robot en la realización de las tareas. Por ejemplo, en un robot humanoide es necesario controlar su equilibrio inestable y la marcha mediante sensores inerciales, inclinómetros y acelerómetros. Según diversos criterios, se pueden diferenciar diferentes tipos de sensores internos robóticos:
- Posición:
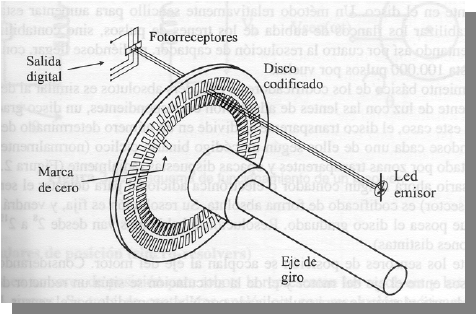
-Digitales (encoders absolutos, regla óptica y encoders incrementales).
- Velocidad:
- Presencia:
-Óptico.
-Capacitivo.
-Ultrasónico.
-Efecto hall.
-Contacto.
-Célula reed.

Encoder incremental

Sincro-resolver

LVDT

Inductosyn
-Los elementos terminales: Estas piezas sirven para para sujetar los diversos componentes del robot, mantenerlos unidos, y evitar que el robot se desmorone, son su estructura, y, a parte, otros se encargan de mejorarla y perfeccionarla, es decir, las herramientas empleadas para su fabricación. El elemento terminal debe ser capaz de agarrar la carga máxima del robot, a la vez que debe ser de dimensiones y peso reducido. Esto obliga en muchas ocasiones a soluciones de compromiso en las que el elemento terminal se diseña para una aplicación concreta. Los elementos terminales más comunes empleados en la estructura son:

Otros elementos o herramientas empleados en la fabricación del robot son:
- Pinza soldadura por puntos: Dos electrodos que se cierran sobre la pinza a soltar.
- Soplete soldadura al arco: Aportan el flujo de electrodos que se funden.
- Cucharón para colada: Para trabajos de fundición.
- Atornillador: Suelen incluir la alimentación de tornillos.
- Fresa-lija: Para perfilar, eliminar rebabas, pulir, etc.
- Pistola de pintura: Por pulverización de la pintura.
- Cañón láser: Para corte de materiales, soldadura, o inspección.
- Cañón de agua a presión: Para corte de materiales.

Algunos elementos terminales


PROGRAMACIÓN:
Una vez terminado todo el apartado mecánico y electrónico del robot, es decir, el concepto físico del robot (estructura, componentes, sensores, cableado...), solamente falta por realizar el apartado informático de dicho artefacto, o lo que se podría considerar de alguna manera como el concepto psicológico del robot, su conducta. Una vez tenemos un robot montado, por sí solo no es capaz de hacer absolutamente nada, es necesario programarlo, es decir, introducirle las órdenes, los movimientos, o las acciones que deba realizar para lograr el fin con el que se creó el robot, mediante un ordenador externo.
Por ejemplo, cuando ponemos en marcha un robot y pulsamos un botón para que avance, el robot recibirá una señal eléctrica, pero, si no está programado, no podrá interpretarla, por lo que no avanzará, no hará nada. Sin embargo, si lo programamos de manera que al recibir esa señal realice las acciones necesarias para avanzar, cuando el robot reciba esa señal en concreta, sí que la sabrá interpretar, porque está programado, y, entonces, avanzará.
Estracto de la programción de un robot
Y, ahora sí, una vez tengamos el robot montado y programado, por fin estará terminado y listo para su funcionamiento. Un ejemplo de esquema que puede servir para programar un robot es el que se muestra a continuación, donde cada cuadrado o "caja" representa a su vez un subprograma encargado de realizar una de las numerosas tareas de las que se compone el proceso total. Este esquema que mostramos es el esquema mínimo necesario para conseguir movimiento en el robot, es decir, es el cerebro de cualquier robot que necesite realizar movimientos concretos:

Esquema eléctrico de un chip que se encarga del movimiento del robot
En primer lugar, el programa necesita la posición inicial y la final del robot, es decir, en qué posición se encuentra antes de realizar el movimiento deseado y en qué posición se encontrará una vez realizado este movimiento, para programar el movimiento deseado en el robot, como se ve a la izquierda en azul. Estas posiciones entran a la caja de "Planificación", que es la encargada de determinar todos los puntos intermedios por los que debe pasar el robot antes de llegar a la posición final (esta caja es sumamente importante y debe estar muy bien programada, pues sin ella el robot intentaría realizar todos los movimientos de golpe y sin ningún orden, colapsándose muy rápidamente).
Tras esto, un demultiplexor copia esta información tantas veces como miembros (brazos, piernas, ruedas o elementos de movimiento) tenga el robot, y así en cada uno de ellos se puede realizar el movimiento correspondiente para que en conjunto todos consigan el movimiento final deseado. En cada uno de ellos hay un PID, que es un regulador que consigue que el movimiento empiece de cero, llegue a la velocidad deseada sin brusquedad, y se frene de manera suave.
Finalmente, tras los PID están los amplificadores que generarán la potencia o fuerza necesaria para cada movimiento. En este punto el robot ya se empieza a mover. Hecho esto, un multiplexor fusiona toda la información de todos los miembros en un único formato para que pueda ser procesada por el procesador. El procesador obtiene la aceleración que lleva el robot y, mediante distintas funciones matemáticas que deben ser programadas, se encarga de integrar la aceleración para obtener la velocidad e integra la velocidad para obtener la posición actual, que será la posición inicial del próximo movimiento.